Automation1 XC4e Enhanced, PWM Servo Drive
The XC4e PWM digital drive is an enhanced single-axis motor drive designed for ultra-precise motion control applications. All versions communicate to Automation1 PC- and Drive-based controller products utilizing the HyperWire® motion bus. The amplifiers control brushless DC, brush DC, voice coil and stepper motor types at up to 340 VDC operating voltage and 30 A peak current capability.
Description
Specifications
Dimensions
Ordering Info
Downloads
Description
Description
Specifications
Dimensions
Ordering Info
Downloads
Description
Design Features
- Part of Aerotech's Automation1 Precision Motion Control Platform
- Compatible with A3200 version 6.04 and newer
- HyperWire® fiber-optic interface
- Up to 30 A peak output current
- Integral power supply
- Drive brush, brushless, voice coil, or stepper motors
- Safe torque off (STO) safety circuit
- Drive array consisting of more than 16 million 32-bit elements
- Optional two-axis or three-axis Position Synchronized Output (PSO)
- Optional two-axis or three-axis Part-Speed PSO
- Optional I/O expansion board
- Optional 65K encoder multiplier for amplified sine wave encoders up to 2 MHz
- High resolution digital current, velocity, and position loops
- CE approved, NRTL safety certification, EU 2015/863 RoHS 3 directive
The XC4e PWM amplifiers control brushless DC, brush DC, voice coil, or stepper motor types at up to 320 VDC operating voltage and 30 A peak current capability. The current loop and servo-loop are closed digitally to assure the highest level of positioning accuracy and rate stability. This allows loop closure rates of up to 20 kHz and allows digital and analog I/O processing, data collection, process control, and encoder multiplication tasks in real time.
All versions are compatible with the Automation 3200 motion platform utilizing the HyperWire® motion bus.
See how Automation1 Servo Drives Improve In-Position Stability.
Standard features for the XC4e include safe torque off (STO), a data array consisting of over 16 million 32-bit elements, digital and analog I/O (see table), one-axis Position Synchronized Output (PSO), dedicated home and end-of-travel limit inputs, and an enhanced current sense device. Encoder support includes square-wave, sine-wave, and absolute encoders.
The standard XC4e accepts square-wave encoder feedback at rates of up to 40 million counts-per-second. Sine-wave encoders can be multiplied by up to 65,536, producing Aerotech’s highest-resolution position feedback, with the optional encoder multiplier feature. Dual-multiplied encoder feedback is supported.
Each single-axis XC4e PWM digital drive can be ordered with the MX2 high-performance single encoder multiplier or the MX3 high-performance dual-loop encoder multiplier, enabling higher levels of position and velocity control.
Also available are a wide variety of extensions of the base PSO functionality. Track up to three encoders in real time with three-axis PSO or extend PSO’s functionality to kinematic arrangements through the use of Aerotech’s Part-Speed PSO feature.
Each drive has an optional I/O expansion board to greatly increase the number of I/O points. This I/O board includes a dedicated PSO output and a PSO synchronization input, often used to synchronize process control with an external mode-locked frequency input.
Feature |
Description |
| Motor Style | Brush, brushless, voice coil, stepper_1 |
| Motor Supply | Single-phase 0-240 VAC; 50/60 Hz |
| Control Supply | 100-240 VAC; 50/60 Hz |
| Bus Voltage_2 | 0-340 VDC |
| Peak Output Current (1 sec)_3 | 10 Apk | 20 Apk | 30 Apk |
| Continuous Output Current(3)(4) | 5 Apk | 10 Apk | 10 Apk |
| Position Synchronized Output (PSO) | Standard: One-axis PSO (includes one-axis Part-Speed PSO) Optional: Two-axis PSO (includes two-axis Part-Speed PSO) Three-axis PSO (includes three-axis Part-Speed PSO) Two-axis Part-Speed PSO only Three-axis Part-Speed PSO only |
| 25-Pin Motor Feedback Connector | High-speed differential inputs (encoder sin, cos, and marker)* CW and CCW limits Hall effect sensor inputs (A, B, and C) Analog motor temperature input (accepts digital) Brake output |
| 26-Pin Auxiliary Feedback Connector | High-speed differential inputs (encoder sin, cos and marker)* 4x optically isolated digital inputs 4x optically isolated digital outputs 1x 16-bit differential ±10 V analog input 1x 16-bit single-ended ±10 V analog output 2x optically isolated high-speed inputs *This channel is bidirectional and can be used to echo out encoder signal |
| Multiplier Options | MX0 Option: Primary Encoder: 40 million counts-per-second square-wave input. Auxiliary Encoder: 40 million counts-per-second square-wave input. MX2 Option: Primary Encoder: 2 MHz / 450 kHz (bandwidth selectable) sine-wave input, encoder multiplier up to 65,536 Auxiliary Encoder: 40 million counts per second square-wave input MX3 Option: Primary Encoder: 2 MHz / 450 kHz (bandwidth selectable) sine-wave input, encoder multiplier up to 65,536 Auxiliary Encoder: 450 kHz sine-wave input, encoder multiplier up to x16,384* *Encoders multiplied with this input cannot be echoed out. |
| I/O Expansion Board (-EB1) | 1x additional PSO connection point 1x PSO synchronization input 16x digital inputs, optically isolated 16x digital outputs, optically isolated 3x analog inputs, 16-bit, differential, ±10 V 3x analog outputs, 16-bit, single-ended, ±10 V |
| Drive Array Memory | 16,777,216 32-bit elements |
| High-Speed Data Capture | Yes (50 ns latency) |
| Safe Torque Off (STO) | Yes, SIL3/PLe/Cat 4 |
| HyperWire Connections | 2x HyperWire small form-factor pluggable (SFP) ports |
| Automatic Brake Control | Standard; 24 V at 1 A |
| Absolute Encoder | Renishaw resolute BiSS; EnDat 2.1; and EnDat 2.2 |
| Current Loop Update Rate | 20 kHz |
| Servo Loop Update Rate | 20 kHz |
| Power Amplifier Bandwidth | Selectable through software (85-95% efficiency) |
| Minimum Load Inductance | 0.1 mH |
| Operating Temperature | 0 to 40°C |
| Storage Temperature | -30 to 85°C |
| Weight | 2.36 kg (5.20 lb) |
| Compliance | CE approved, NRTL safety certification, EU 2015/863 RoHS 3 directive |
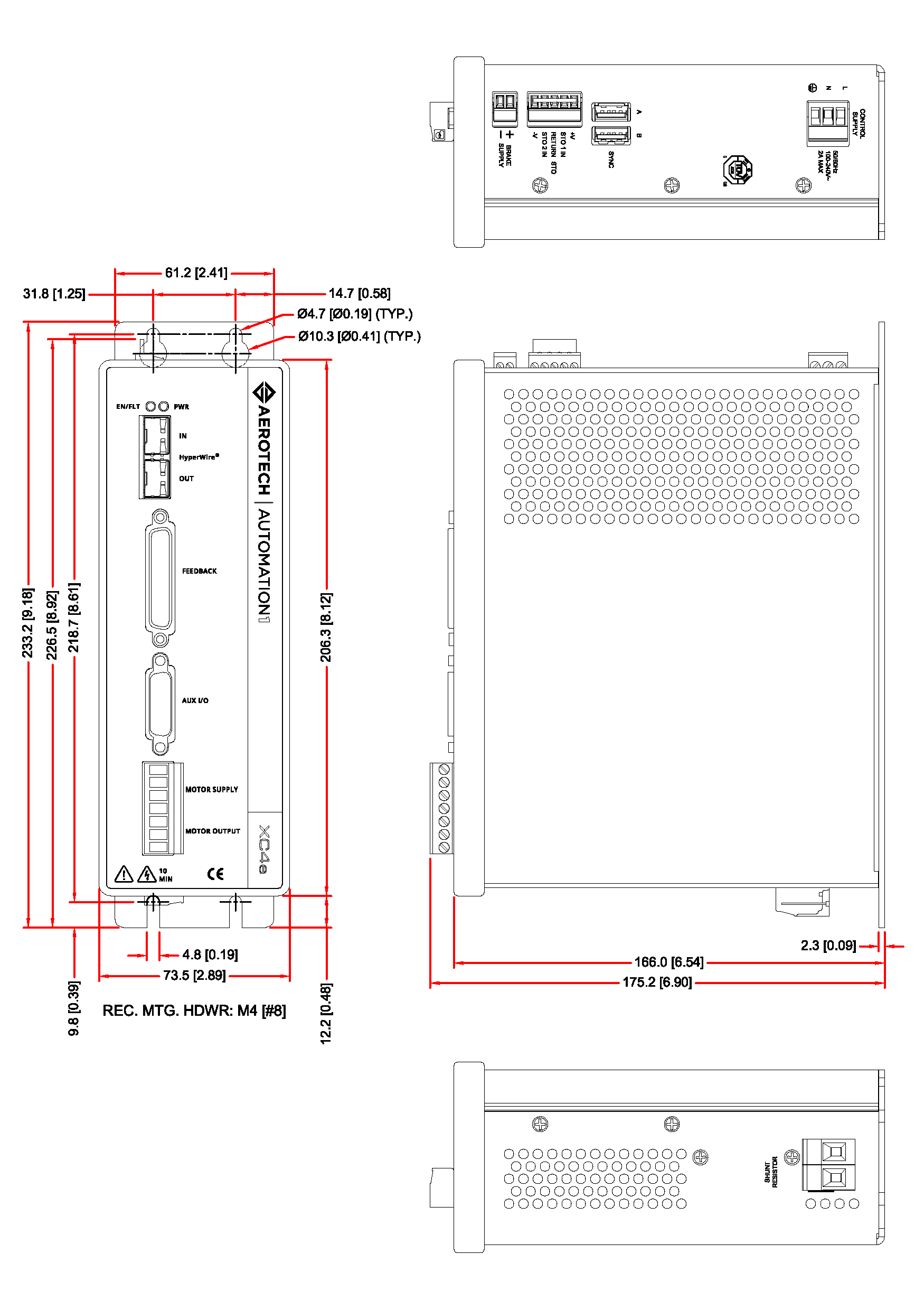
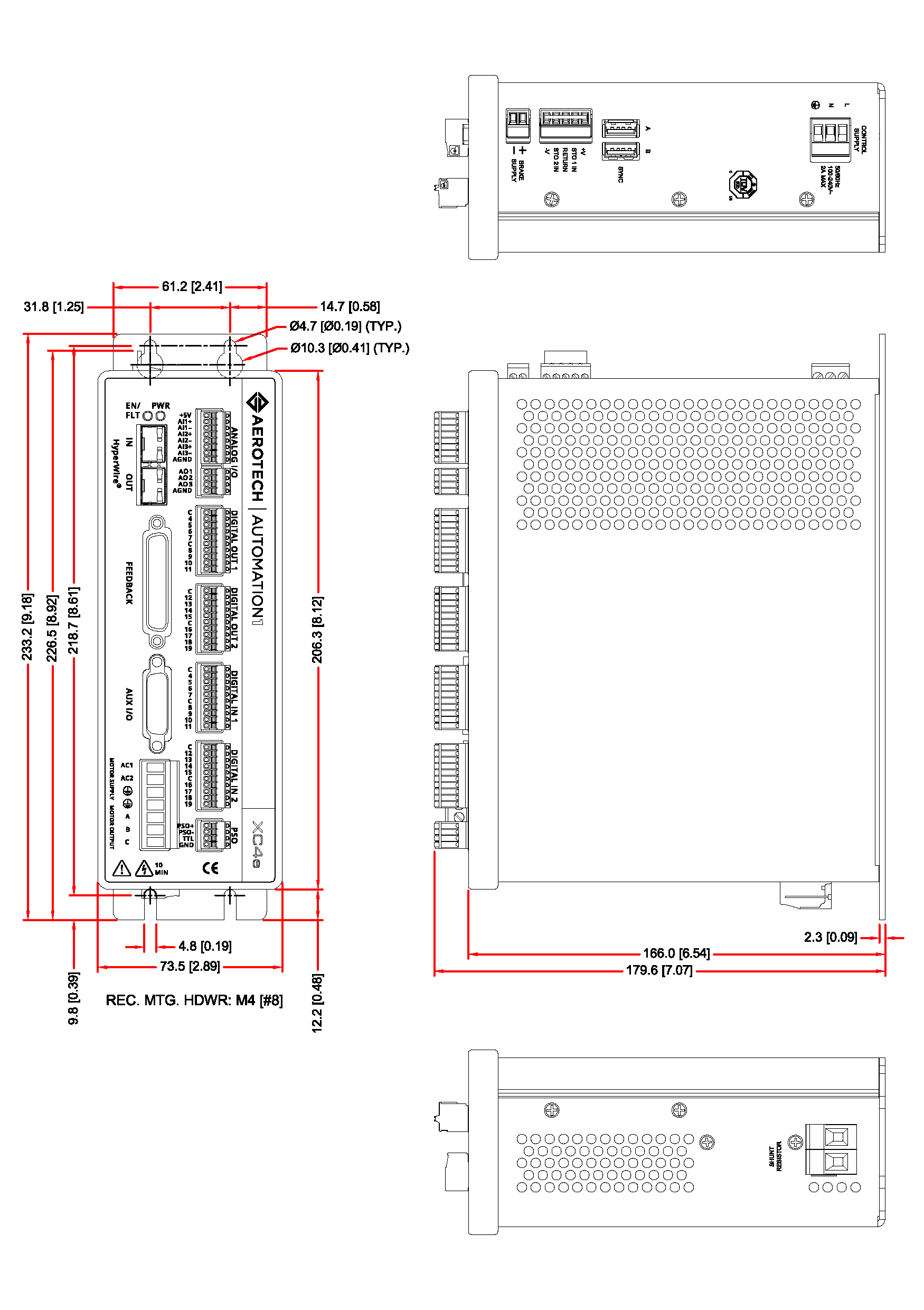
Dimensions
Automation1 XC4e, -EB0 Option
Automation1 XC4e, -EB1 Option
Ordering Information
XC4e
| Option | Description |
| XC4e | XC4e PWM digital drive |
Peak Current
| Option | Description |
| -10 | 10 A peak, 5 A cont. current (default) |
| -20 | 20 A peak, 10 A cont. current |
| -30 | 30 A peak, 10 A cont. current |
Expansion Board
| Option | Description |
| -EB0 | No expansion board (default) |
| -EB1 | IO expansion board |
Multiplier
| Option | Description |
| -MX0 | No encoder multiplier (default) |
| -MX2 | 2 MHz x65536 multiplier (primary), no multiplier (auxiliary) |
| -MX3 | 2 MHz x65536 multiplier (primary), 450 kHz x16384 multiplier (auxiliary) |
PSO
| Option | Description |
| -PSO1 | One-Axis PSO (default) |
| -PSO2 | Two-Axis PSO |
| -PSO3 | Three-Axis PSO |
| -PSO5 | Two-Axis Part-Speed PSO |
| -PSO6 | Three-Axis Part-Speed PSO |
External Shunt
| Option | Description |
| -SX0 | No 2-pin connector for external shunt (default) |
| -SX1 | 2-pin connector for external shunt |