Automation1 iXC4e Enhanced, PWM Servo Drive with Motion Controller
The iXC4e is the powerful center of your motion control architecture. It has a full motion controller, connects to other Automation1 drives over HyperWire and connects to other automation devices over EtherCAT, Modbus TCP/IP or a TCP Socket interface.
Description
Specifications
Dimensions
Ordering Info
Downloads
Description
Description
Specifications
Dimensions
Ordering Info
Downloads
Description
Design Features
- Unlock the full motion control power of our Automation1 iSMC intelligent software-based motion controller
- Features complete configuration & performance capability of XC4e servo motor drive
- Connect to the controller using EtherCAT, Modbus or a Socket interface
- Enjoy up to 12 axes of control by connecting more Automation1 drives over the HyperWire fiber-optic bus
- Expand your I/O by adding expansion board to the iXC4e or to other connected drives
Motion. Control. Together.
The Automation1-iXC4e, a hardware platform for running the Automation1-iSMC intelligent software-based motion controller, features a servo motor drive. That means it has the ability to run your entire machine’s control, act as a servo drive for a single axis and control up to 11 added axes of motion over our fiber-optic HyperWire motion bus. The supported EtherCAT, Modbus TCP and Socket interface enable true full machine and motion system control. Combining this technology on a single hardware device lowers your machine costs, reduces machine size and increases reliability.
The iSMC, which runs on the iXC4e, is programmable in AeroScript from the Automation1 Studio application and several available APIs.
Automation1
The iXC4e is a part of the user-friendly Automation1 motion control platform, which includes the following:
The iXC4e enhanced PWM servo drive with motion controller is the right choice for your precision machine or system. It begins with superior motion control technology. The Automation1-iSMC (configured separately and installed on the iXC4e) contains technology once reserved for high-end PC-based architectures.
That’s not the only reason the iXC4e is a game-changer. It also contains our XC4e single-axis PWM digital drive -- within the same compact package. You can also add up to 11 additional axes of control over the HyperWire® fiber-optic motion bus.
The iSMC controller can connect to, command and control any other Automation1 servo motor drive. The iXC4e and additional servo motor drives can be configured with I/O expansion boards, giving the iSMC controller the connectivity required to take full control of your machine or system.
The iXC4e PWM amplifiers control brushless DC, brush DC, voice coil or stepper motor types at up to 340 VDC operating voltage and 30 A peak current capability. The current loop and servo loop are closed digitally at 20 kHz, assuring the highest level of positioning accuracy and repeatability. Digital and analog data collection and position capturing occur at the same 20 kHz rates. Axis and process data is quickly communicated to the motion controller for processing in real time.
Standard drive features for the iXC4e include safe torque off (STO), a data array consisting of over 16 million 32-bit elements (67 MB), digital and analog I/O (see table), one-axis Position Synchronized Output (PSO), dedicated home and end-of-travel limit inputs, and an enhanced current sense device. Encoder support includes squarewave, sine-wave and absolute encoders.
The standard iXC4e accepts square-wave encoder feedback at rates of up to 40 million counts-per-second. Sine-wave encoders can be multiplied by up to 65,536 -- producing our highest resolution position feedback -- with the optional encoder multiplier feature. Dual-multiplied encoder feedback is supported. Each single-axis iXC4e can be configured with the MX2 high-performance single encoder multiplier or the MX3 high performance dual-loop encoder multiplier, enabling higher levels of position and velocity control.
Choose from a wide variety of extensions of the base PSO functionality. Track up to three encoders in real time with three axis PSO or extend PSO’s functionality to kinematic arrangements with the part-speed PSO feature.
Each drive-based controller has an optional I/O expansion board, significantly increasing the number of I/O points. This I/O board includes a dedicated PSO output and a PSO synchronization input, which are often used to synchronize process control with an external mode-locked frequency.
Platform Power
More than just hardware, the iXC4e gives you access to the complete power of the Automation1 motion control platform. This includes the Automation1 motion development kit (MDK), the intelligent software-based controller (iSMC) and the powerful AeroScript™ programming language with integrated RS-274 G and M code support. The Automation1 iSMC can also be programmed by various controller APIs, providing flexible methods of integrating the iXC4e and the machine and axes it controls into your system architecture.
Specification |
Description |
| Motion Controller(1) | Aerotech’s Automation1 iSMC Intelligent Software-Based Motion Controller (version 2.00 and above) |
| Motor Style | Brush, brushless, voice coil, stepper(2) |
| Motor Supply | Single-phase 0-240 VAC; 50/60 Hz |
| Control Supply | 100-240 VAC; 50/60 Hz |
| Bus Voltage(3) | 0-340 VDC |
| Peak Output Current (1 sec)(4) | 10 Apk | 20 Apk | 30 Apk |
| Continuous Output Current(4)(5) | 5 Apk | 10 Apk | 10 Apk |
| Position Synchronized Output (PSO) | Standard: One-axis PSO (includes one-axis part-speed PSO) Optional: Two-axis PSO (includes two-axis part-speed PSO) Three-axis PSO (includes three-axis part-speed PSO) Two-axis part-speed PSO only Three-axis part-speed PSO only |
| 25-Pin Motor Feedback Connector | High-speed differential inputs (encoder sin, cos and marker) CW and CCW limits Hall effect sensor inputs (A, B and C) Analog motor temperature input (accepts digital) Brake output |
| 26-Pin Auxiliary Feedback Connector | High-speed differential inputs (encoder sin, cos and marker)* 4x optically isolated digital inputs 4x optically isolated digital outputs 1x 16-bit differential ±10 V analog input 1x 16-bit single-ended ±10 V analog output 2x optically isolated high-speed inputs *This channel is bidirectional and can be used to echo out encoder signal |
| Multiplier Options | MX0 Option: Primary Encoder: 40 million counts-per-second square-wave input Auxiliary Encoder: 40 million counts-per-second square-wave input MX2 Option: Primary Encoder: 2 MHz / 450 kHz (bandwidth selectable) sine-wave input, encoder multiplier up to 65,536 Auxiliary Encoder: 40 million counts per second square-wave input MX3 Option: Primary Encoder: 2 MHz / 450 kHz (bandwidth selectable) sine-wave input, encoder multiplier up to 65,536 Auxiliary Encoder: 450 kHz sine-wave input, encoder multiplier up to x16,384* *Encoders multiplied with this input cannot be echoed out. |
| I/O Expansion Board (-EB1) | 1x additional PSO connection point 1x PSO synchronization input 16x digital inputs, optically isolated 16x digital outputs, optically isolated 3x analog inputs, 16-bit, differential, ±10 V 3x analog outputs, 16-bit, single-ended, ±10 V |
| Drive Array Memory | 16,777,216 32-bit elements (67 MB) |
| High-Speed Data Capture | Yes (50 ns latency) |
| Safe Torque Off (STO) | Yes, SIL3/PLe/Cat 4 |
| HyperWire Connections | 1x HyperWire small form-factor pluggable (SFP) ports |
| Automatic Brake Control | Standard; 24 V at 1 A |
| Absolute Encoder | Renishaw resolute BiSS; EnDat 2.1; and EnDat 2.2 |
| Current Loop Update Rate | 20 kHz |
| Servo Loop Update Rate | 20 kHz |
| Power Amplifier Bandwidth | Selectable through software (85-95% efficiency) |
| Minimum Load Inductance | 0.1 mH |
| Operating Temperature | 0 to 40°C |
| Storage Temperature | -30 to 85°C |
| Weight | 2.36 kg (5.20 lb) |
| Compliance | CE approved, NRTL safety certification, EU 2015/863 RoHS 3 directive |
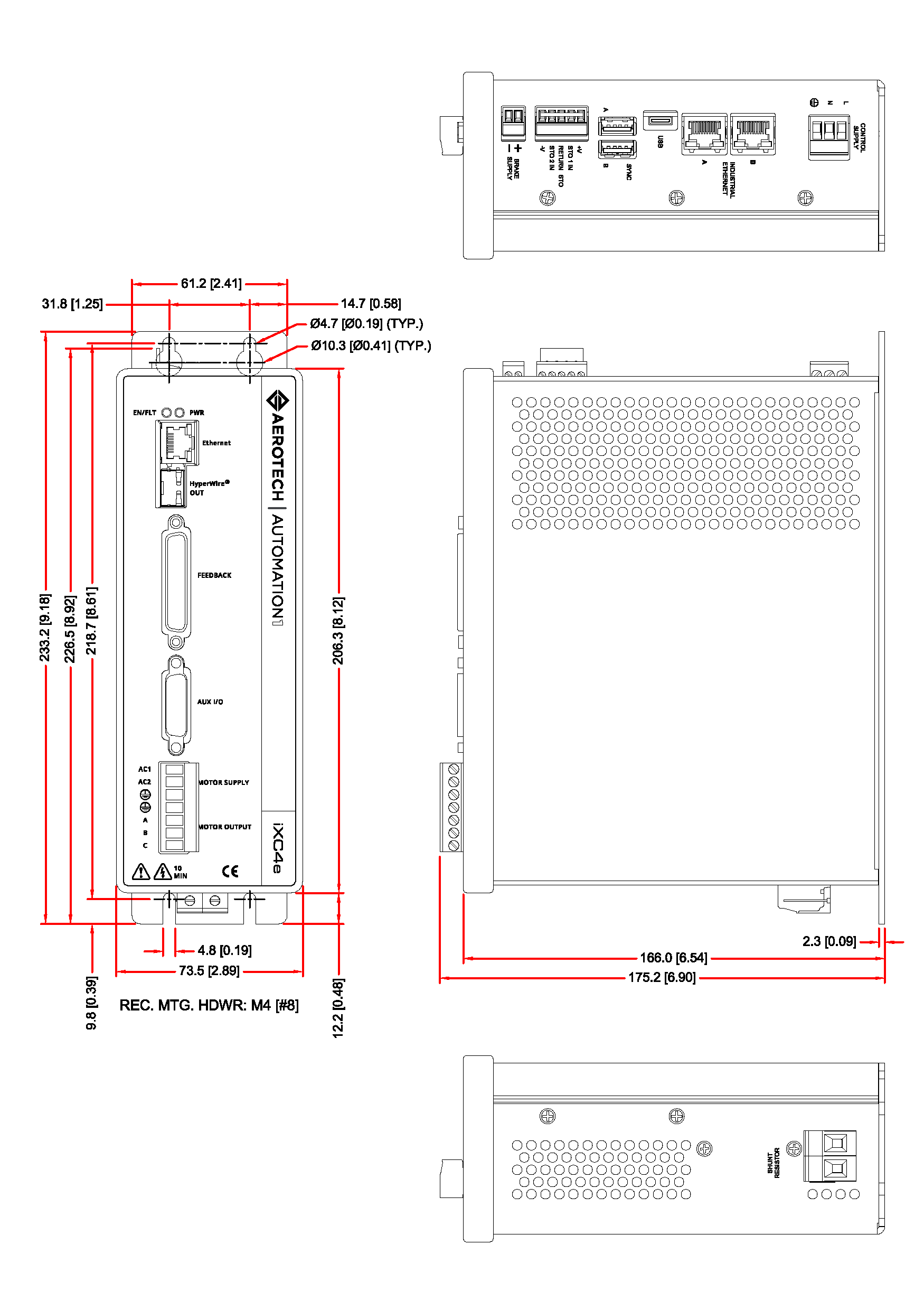
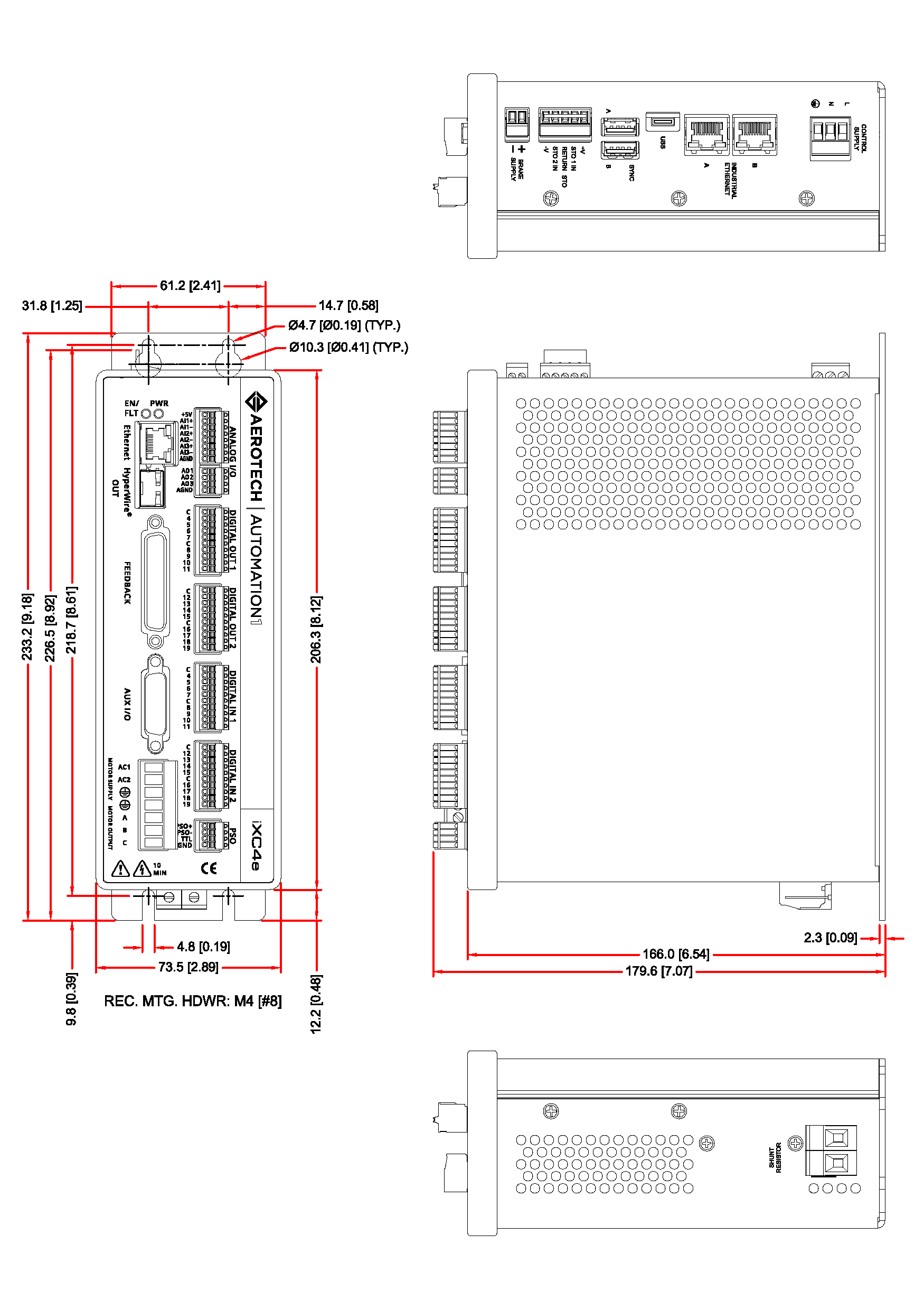
Dimensions
Automation1 iXC4e, -EB0 Option
Automation1 iXC4e, -EB1 Option
Ordering Information
Controller Configuration
| Description |
| To configure and load the motion controller on the iXC4e drive, please use configure and order an Automation1-iSMC intelligent controller with your iXC4e drive. The Automation1-iSMC configuration should include the iXC4e as the “hardware platform.” |
Automation1 iXC4e
| Option | Description |
| Automation1 iXC4e | PWM Servo Drive with Motion Controller |
Peak Current
| Option | Description |
| -10 | 10 A peak, 5 A cont. current (default) |
| -20 | 20 peak, 10 A cont. current |
| -30 | 30 A peak, 10 A cont. current |
Expansion Board
| Option | Description |
| -EB0 | No expansion board |
| -EB1 | IO expansion board |
Multiplier
| Option | Description |
| -MX0 | No encoder board (default) |
| -MX2 | 2 MHz x65536 multiplier (primary), no multiplier (auxiliary) 2 MHz / 450 kHz (bandwidth selectable) x16384 multiplier (primary), no multiplier (auxiliary) |
| -MX3 | 2 MHz x65536 multiplier (primary), 450 kHz x16384 multiplier (auxiliary) |
PSO
| Option | Description |
| -PSO1 | One-Axis PSO (default) |
| -PSO2 | Two-axis PSO |
| -PSO3 | Three-axis PSO |
| -PSO5 | Two-axis part-speed PSO |
| -PSO6 | Three-axis part-speed PSO |
External Shunt
| Option | Description |
| -SX0 | No 2-pin connector for external shunt (default) |
| -SX1 | 2-pin connector for external shunt |