Capability Overview, Laser Scan Heads
Capability Overview
DrillOptimizer for Galvo Scanner Systems
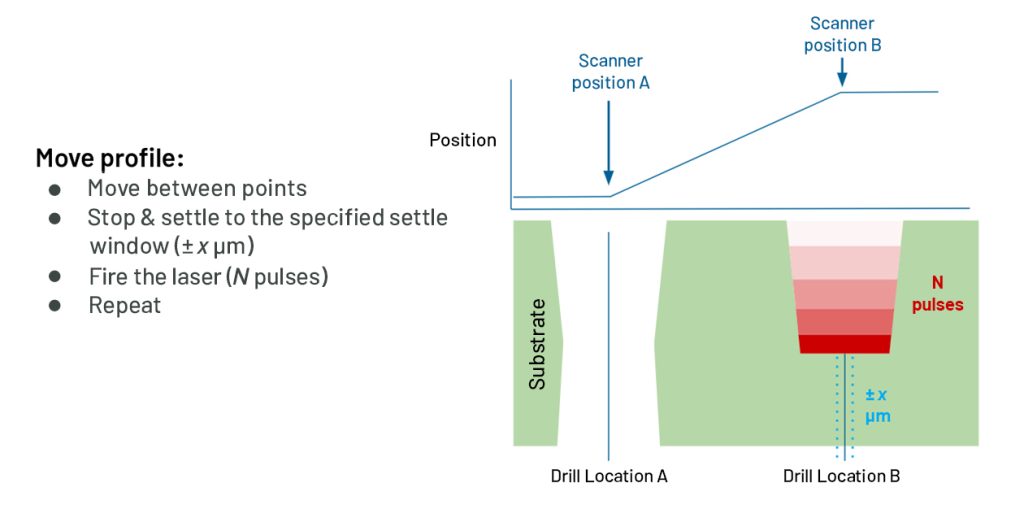
Aerotech’s DrillOptimizer, an advanced feature of AeroScriptPlus, is designed for equipment manufacturers who use galvo scanner systems to perform laser drilling with high-dynamic point-to-point motion. This motion, depicted in Figure 1, is commonly referred to as step and settle.
Optimizing step and settle motion for thousands to millions of hole locations that differ in distance is a challenging motion optimization problem. It demands finding the shortest distance through the points and determining how the controller should behave for each move to minimize overall cycle time.
DrillOptimizer solves both of these problems so users can rapidly iterate their specific move profile and achieve maximum performance for any move size with zero move delay on their hardware – ultimately making laser drilling more efficient. It does this in two parts. Motion Sequence Optimization generates the shortest distance through the points and Step and Settle Optimization optimizes the scanner hardware to achieve maximum performance for each individual move in the path defined. When combined with Position-Synchronized Output (PSO) and Infinite Field of View (IFOV), this tool enables large panel processing of large amounts of holes with guaranteed precision – all while obtaining every bit of performance from the galvo scanner hardware.
Motion Sequence Optimization
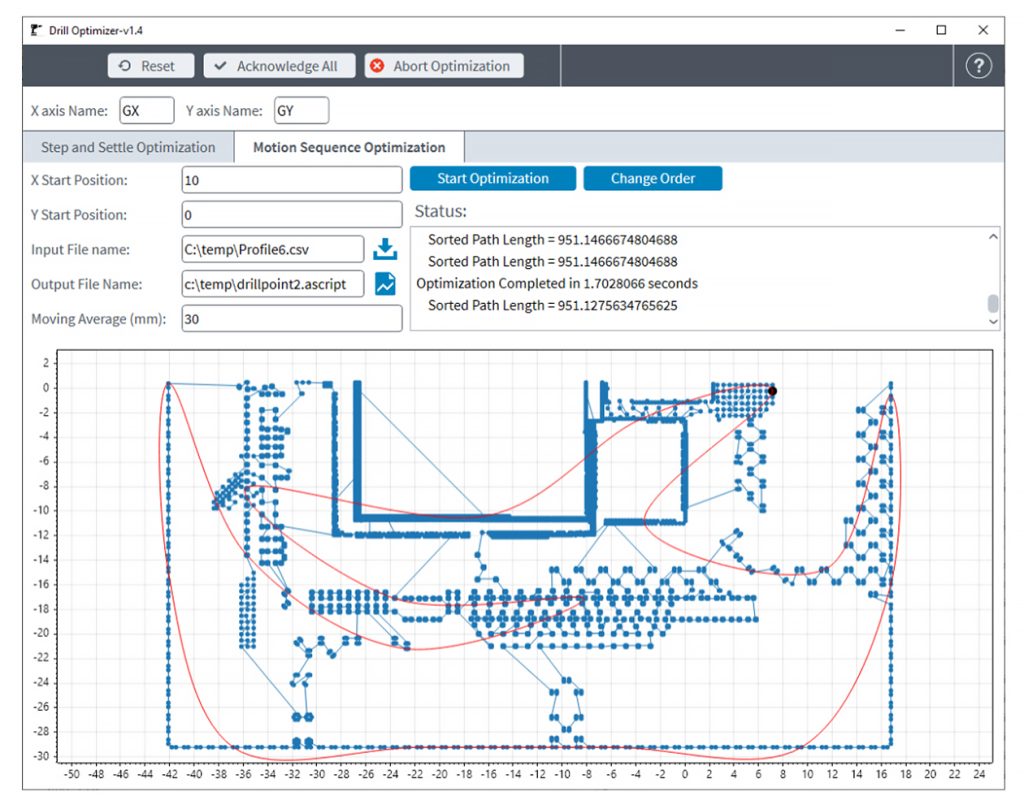
During Motion Sequence Optimization, DrillOptimizer converges on the most efficient path through a pattern of holes to be made within a single scanner field of view (FOV) or by combining the scanner’s FOV with a servo stage system using IFOV. First, users input their specific patterns and provide parameters for start and end point locations and the direction of travel. The output is a simplified file that defines the most efficient pattern for the scanner system to follow. Motion Sequence Optimization will work on patterns with over one million points and can take as little as a few seconds to complete. Figure 2 shows an example of the DrillOptimizer interface that outputs the optimal pattern as described above.
Step and Settle Optimization
Traditionally, servo control loops need to be optimized for a single move distance, which results in lower performance for all other moves. DrillOptimizer, however, leverages a powerful AeroscriptPlus library file that enables all step moves to use the optimal set of controller parameters for any specific step distance without leaving the user-defined settle window. If the scanner never leaves the settle window, it can fire the laser with zero move delay. Conversely, if the scanner error is too high at the end of the move, the laser must wait to fire until the scanner settles into position. Eliminating the settling move delay for all moves is a significant advantage of using DrillOptimizer.
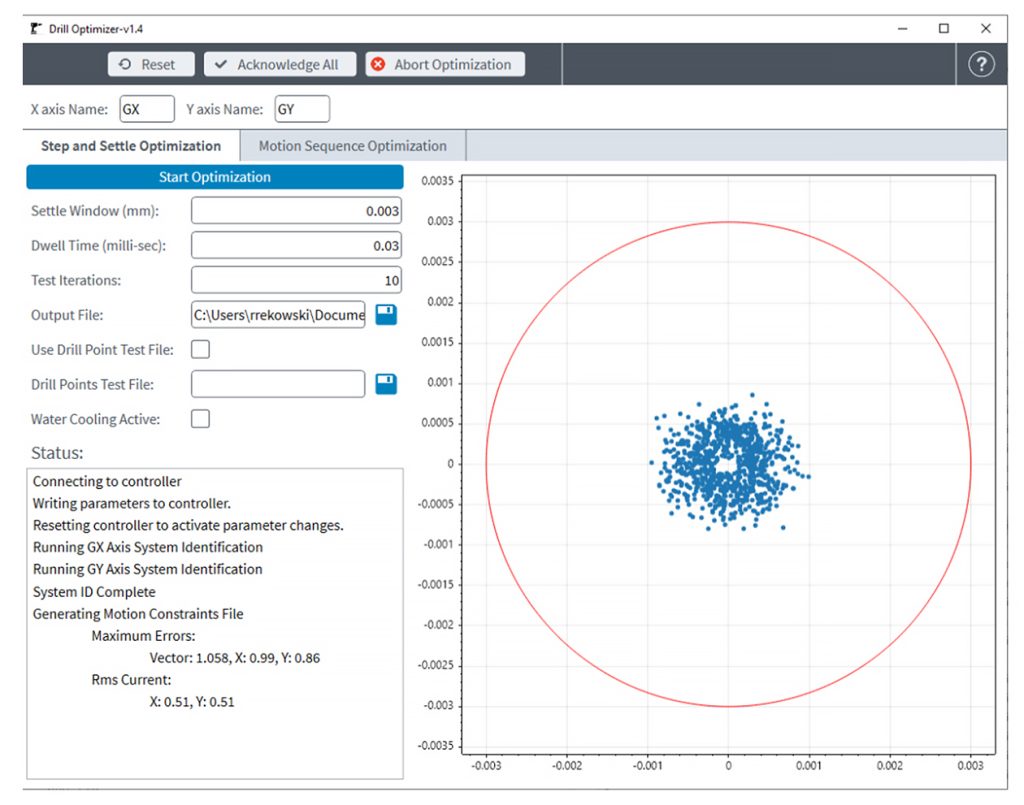
To accomplish this performance, each move in the optimized path needs its own set of tuning parameters to perform any one move in the minimum amount of time without leaving the settle window. Step and Settle Optimization identifies which parameters should be used, taking the user-specified settle window and laser-on time for each drill location as inputs to optimize the system’s galvo hardware. Using machine learning, it converges on the optimal set of parameters and outputs them for the Automation1 controller to use. Figure 3 depicts the Step and Settle Optimization interface with user inputs and a graphical window of the peak vector error for the training moves used.
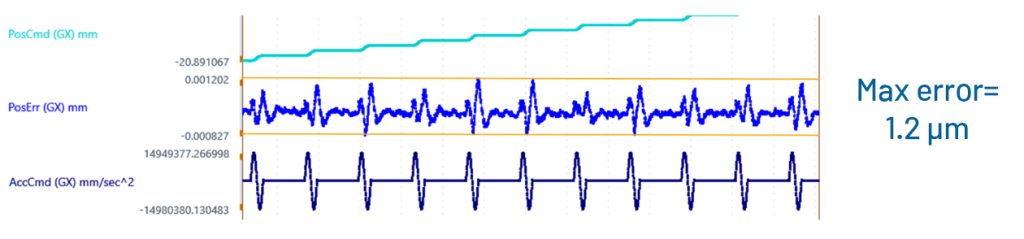
As a result, all moves are made in the minimum amount of time with zero settle delay time and without ever leaving the settle window. In other words, all moves are made at the galvo hardware’s limit. Figure 4 shows data from a test motion profile that ran at 200Khz, demonstrating how accurate DrillOptimizer is at high speeds.
Summary
Machine builders need DrillOptimizer to solve a common, challenging galvo scan head application problem for laser drilling. Path optimization minimizes the overall cycle time by identifying the shortest distance for the scanner to follow. Using that path enables optimization of the controller parameters for the specific scanner hardware performing the motion. All of this is packaged into a Windows user interface for rapid process development and as a .NET DLL so machine builders can incorporate it into their custom HMI software. With only mere minutes of setup time, users benefit from laser drilling performance that reaches the product’s limit, with all moves happening inside of a user’s specified parameters.